真潮流~15
「人の代わり」から「人のサポート」ができるロボットへ
-周辺要素に合わせて仕事が出来るロボットが必要-
最近、製造現場でのロボット活用が進み、工作機械とともに加工システムを構成し、各種作業を行ない、自動化、無人化に貢献している。
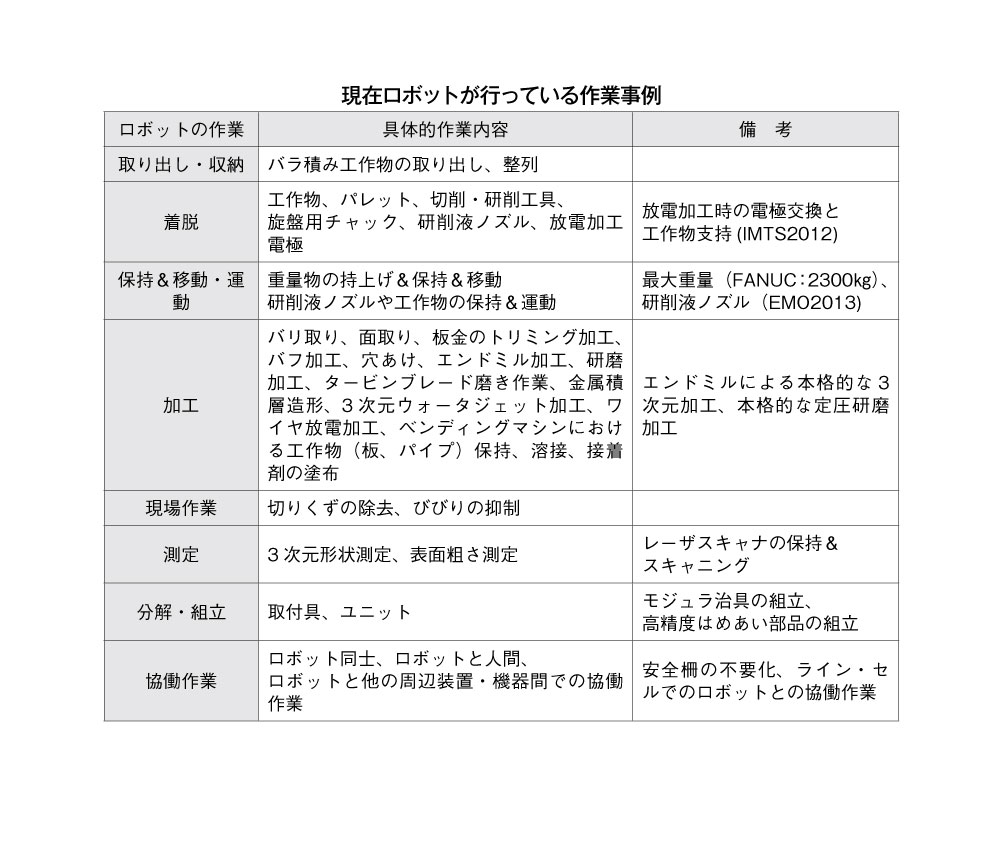
現在、ロボットが行なっている作業事例をEMO、IMTS、JIMTOFでの出展事例を基にまとめてみると表のようになる。大きくは、取り出し・収納、着脱、工作物などを保持しながらの移動・運動、加工、知的現場作業、測定、分解・組立、協働作業など、広範な作業が行えるようになってきた。
取り出し・収納については、単純な作業では無く、バラ積みされている工作物を取り出し、必要な姿勢で必要な位置に整列することができる。保持しながらの移動・運動については、最大重量も2トンを超える重量工作物も保持しながら移動できる。さらには、単なる2点間の移動ではなく、必要な軌道上を運動させることができるので、作業者が研削液ノズルを手で持ち、加工点の移動とともに、必要な箇所にノズルを移動させながら研削液を供給する作業も行える。
加工については、当初は、バリ取り、面取りなどの簡単な作業であったが、最近は、ミリングヘッドをロボットに持たせて、金属製工作物のフライス加工を行なうことが可能になってきた。これが本格的に行えるようになれば、大工が鉋や鑿(のみ)を持って木材加工を行なうように、工作機械が行なう各種加工をロボットが行えるようになることが期待される。そうなれば、超大形の工作機械は不要となり、設置された工作物に対して、工具を保持したロボットが移動しながら、大工のように加工作業を行なうことが可能になる。このようなロボットは、現地加工用工作機械としても期待される。また、金属積層造形を行なう3Dプリンティングもロボットが行えるようになってきており、今後の進展が期待される。
現場作業関連では、熟練作業者が、絡んだ切屑の排除や、びびり振動の様子をみながらその抑制作業を行なっているが、そのような知的な作業も行なう試みが始まっている。また、形状や表面粗さの測定もロボットが行えるようになってきた。分解・組立でも、より公差の厳しい精密部品の組立も可能になってきている。さらには、協働ロボットの登場により、人間との協働作業への適用も進んでいる。人間だけでは無く、ロボット同士、ロボットと周辺機器の協働作業が可能になり、各種適用技術の開発が行なわれている。
以上のようなロボットの適用範囲の広がりをドライブしているのは、ロボットの柔軟性の高度化によるものと思われる。柔軟性を高めているポイントとしては、アームのユニバーサル化や双腕化、小形・ビルトイン化、軽量化、ポータブル化、多機能化、コボット(協働)化、テーチングレス化、知能化等が挙げられる。
このような環境を有効に生かした、製造現場でのロボットの活用法は無限にあるものと思われ、今後、さらに革新的な活用法が出現するこがと楽しみである。その基本は、これまでは、人間の代わりをするロボットであったが、これからは、人間のサポートをするロボットであるということだ。製造現場での同僚、相棒的な存在のロボットである。必要な時に、必要な場所で、必要な時間、自分の行ないたいことをやってくれるロボットだ。最近は、引出しを引き出したり、元に戻したり、ドアを開け閉めしたり、スイッチのボタンを押したりと人間と同じ動作ができるようになってきた。これまでは、ロボットが作業しやすいように周辺要素の構造を単純化してきたが、これからは、周辺要素に合わせて、各種作業を行なえるロボットの開発が必要だ。

- 日本工業大学工業技術博物館 館長 清水 伸二
- 1948年生まれ、埼玉県出身。上智大学大学院理工学研究科修士課程修了後、大隈鐵工所(現オークマ)に入社し、研削盤の設計部門に従事。1978年に上智大学博士課程に進み、1994年から同大学教授。工作機械の構造や結合部の設計技術の研究に従事し、2014年に定年退職し、名誉教授となる。同年、コンサル事務所MAMTECを立ち上げるとともに、2019年4月には日本工業大学工業技術博物館館長に就任した。趣味は写真撮影やカラオケなど。